Sensing in autonomous driving
- Ansprechperson:
- Projektgruppe:
Maschinelles Lernen für Hochdurchsatzverfahren und Mechatronik (ML4HOME)
- Projektbeteiligte:
Hochschule Ravensburg-Weingarten
- Starttermin:
2019
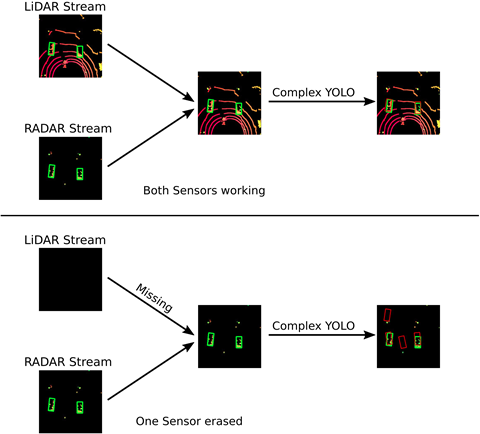
Das Projekt beschäftigt sich mit der Robustheit von Sensorfusions-Methoden zur Objektdetektion beim autonomen Fahren. Sensorfusion ist für das autonome Fahren von besonderem Interesse, da sie die Vorteile verschiedener Sensoren kombiniert. Jedoch fällt die Performanz von Objektdetektoren rapide ab, falls ein Sensor ausfällt oder gestört wird. Daher ist es von großer Bedeutung Objektdetektoren im Hinblick auf Sensorstörung zu untersuchen und Methoden zu entwickeln diese darauf vorzubereiten.