Sensing in autonomous driving
- Contact:
- Project Group:
Machine Learning for High-Throughput Methods and Mechatronics (ML4HOME)
- Partner:
University of Applied Sciences Ravensburg-Weingarten (RWU)
- Startdate:
2019
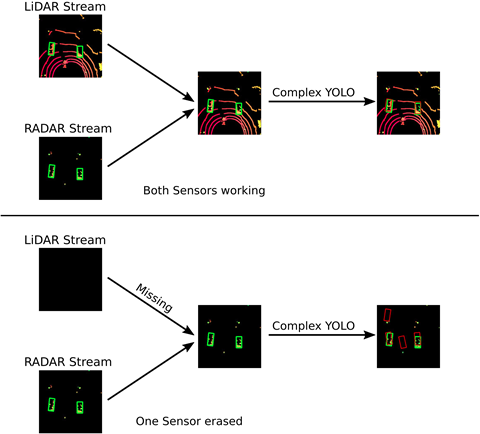
The project deals with the robustness of sensor fusion methods for object detection in autonomous driving. Sensor fusion is of particular interest for autonomous driving because it combines the advantages of different sensors. However, the performance of object detectors drops rapidly if one sensor fails or is disturbed. Therefore, it is of great importance to study object detectors with respect to sensor disturbance and to develop methods to prepare them for this.